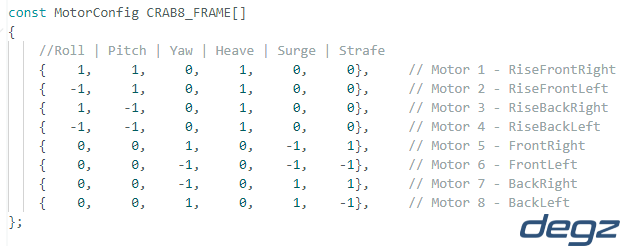
tam öyle değil, aracın kontrol sistemi 6 eksenden oluştuğu için her motorun her eksen için oluşturacağı itkiyi düşünerek yapman gerekiyor. Mesela 6 motorlu bir frame'de ön sağ motor hem aracın yaw ekseninde hareketini sağlıyor, hem ileri geri hem de sağa sola gitme hareketini de sağlıyor. Ona göre değerler giriyoruz, 45 derece duran motorlar için 0.5 veya -0.5(yönüne göre) girebilirsiniz