Merhaba, Jetson nano ve pixhawk kullanan bir su altı robotomuz var pymavlink ile kod yazıyoruz çoğu kodda atıyorum kanal 1 e 1900 pwm gönderiyor ama sistemde aynı anda 4 motor haraket ediyor diğer kanala gönderiyor ozaman sadece diğer iki motor grup halinde aynı anda çalışıyor QgroundControl de motorları tek tek slide ile döndürebiliyoruz o kısımda sıkıntı yok ama aracımıza kol bağladımız zaman yine aynı şekil grup olarak dönüyorlar aracımızı otonom çalıştırmaya çalışıyoruz.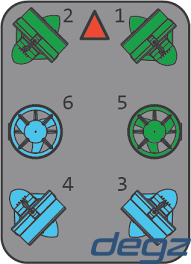
fotoğraftaki dizilimi kullanıyoruz
Örnek Olarak:
kanal 1 pwm 1900: 1. 2. 3. 4. motorlar aynı anda dönüyor
kanal 2 pwm 1900 : 5 ve 6. motorlar aynı anda dönüyor
kanal 3 pwm 1900 : 5 ve 6. motorlar aynı anda dönüyor
kanal 4 pwm 1900: 1. 2. 3. 4. motorlar aynı anda dönüyor
kanal 5 pwm 1900: 1. 2. 3. 4. motorlar aynı anda dönüyor
kanal 6 pwm 1900: 1. 2. 3. 4. motorlar aynı anda dönüyor